
Die Entwicklungsgeschichte meiner Roboter
 Begonnen
hat alles im Herbst 1999.Bei meinem Freund Philipp entdeckte ich das Buch
"Mobile Roboter - Von der Idee zur Implementierung" (ISBN 3-893
19-855-5) in diesem Buch wird als erstes beschrieben wie man einen einfachen
analogen Robot baut der mit zwei Bumpern ausgestattet bei einer Kollision ein
Stück zurück setzt und sich danach einen einstellbaren Zeitraum dreht und
danach seine Fahrt geradeaus fortsetzt. Realisiert wird dies durch 2 Relais die
durch 2 R-C Glieder unterschiedlich lang angezogen werden und so die Motoren
unterschiedlich lang rückwärts drehen lassen. Phil sagte mir dann das er den
schon gebaut hatte. Der Robot funktionierte auch sehr gut. Das hat mich auf
Anhieb fasziniert wie dieses kleine Gerät durch das Zimmer gefahren ist und
allen Hindernissen ausgewichen ist.
Begonnen
hat alles im Herbst 1999.Bei meinem Freund Philipp entdeckte ich das Buch
"Mobile Roboter - Von der Idee zur Implementierung" (ISBN 3-893
19-855-5) in diesem Buch wird als erstes beschrieben wie man einen einfachen
analogen Robot baut der mit zwei Bumpern ausgestattet bei einer Kollision ein
Stück zurück setzt und sich danach einen einstellbaren Zeitraum dreht und
danach seine Fahrt geradeaus fortsetzt. Realisiert wird dies durch 2 Relais die
durch 2 R-C Glieder unterschiedlich lang angezogen werden und so die Motoren
unterschiedlich lang rückwärts drehen lassen. Phil sagte mir dann das er den
schon gebaut hatte. Der Robot funktionierte auch sehr gut. Das hat mich auf
Anhieb fasziniert wie dieses kleine Gerät durch das Zimmer gefahren ist und
allen Hindernissen ausgewichen ist.
1. Version
 Im
nächsten Kapitel des Buchs ging es dann um einen Mikroprozessor gesteuerten
Robot (Rug Warrior). Ich habe mir das Buch ausgeliehen und aufmerksam durch
gelesen. Mir ist aber aufgefallen das es ziemlich komplex ist einen Roboter mit
einem Mikroprozessor zu bauen. Also habe ich das Buch wieder zur Seite gelegt.
Doch als ich ein paar Tage später den Conrad-Katalog durchblätterte entdeckte
ich die C-Control-M-Unit und mir ist sofort aufgefallen, dass man damit ganz
einfach einen Robot steuern kann. Ohne eine komplexe Platine mit Prozessor,
Speicher u.s.w. aufzubauen. Ich bin gleich am nächsten Tag zu Conrad und habe
mir die M-Unit, Motoren, Lichtsensoren, Relais und noch ein Paar andere Teile
gekauft. Leider habe ich dann wild drauf los gelötet und es kam ein zwar halbwegst
funktionierender aber völlig chaotischer Roboter dabei heraus. Das Fahrwerk
habe ich aus LEGO Steinen gebaut, deshalb fielen immer mal ein paar Teile ab,
aber es Funzte irgendwie! Nun war der Robot noch nicht viel besser als der
analoge TuteBot. Als nächstes Spendierte ich dem Robot Fotowiederstände zur
Lichterkennung.
Im
nächsten Kapitel des Buchs ging es dann um einen Mikroprozessor gesteuerten
Robot (Rug Warrior). Ich habe mir das Buch ausgeliehen und aufmerksam durch
gelesen. Mir ist aber aufgefallen das es ziemlich komplex ist einen Roboter mit
einem Mikroprozessor zu bauen. Also habe ich das Buch wieder zur Seite gelegt.
Doch als ich ein paar Tage später den Conrad-Katalog durchblätterte entdeckte
ich die C-Control-M-Unit und mir ist sofort aufgefallen, dass man damit ganz
einfach einen Robot steuern kann. Ohne eine komplexe Platine mit Prozessor,
Speicher u.s.w. aufzubauen. Ich bin gleich am nächsten Tag zu Conrad und habe
mir die M-Unit, Motoren, Lichtsensoren, Relais und noch ein Paar andere Teile
gekauft. Leider habe ich dann wild drauf los gelötet und es kam ein zwar halbwegst
funktionierender aber völlig chaotischer Roboter dabei heraus. Das Fahrwerk
habe ich aus LEGO Steinen gebaut, deshalb fielen immer mal ein paar Teile ab,
aber es Funzte irgendwie! Nun war der Robot noch nicht viel besser als der
analoge TuteBot. Als nächstes Spendierte ich dem Robot Fotowiederstände zur
Lichterkennung.
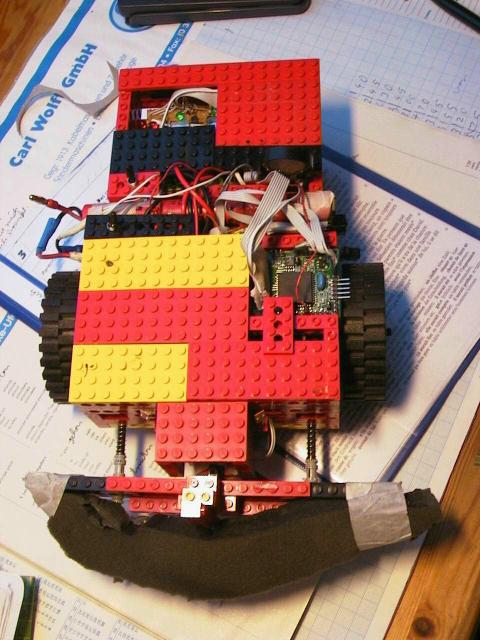
Weiter Bilder von der 1.Version
2.Version
 Nach
der Jahrtausendwende habe ich wieder Lust bekommen den Robot weiter zu
entwickeln. Als Erstes habe ich den wilden Kabelsalat beseitigt und alle
Komponenten auf eine Lochraster Platine gelötet. Es kamen diverse neue Sensoren
und ein neues, stabileres Fahrwerk hinzu. Der Roboter verfügte nun über
folgende Sensoren :
Nach
der Jahrtausendwende habe ich wieder Lust bekommen den Robot weiter zu
entwickeln. Als Erstes habe ich den wilden Kabelsalat beseitigt und alle
Komponenten auf eine Lochraster Platine gelötet. Es kamen diverse neue Sensoren
und ein neues, stabileres Fahrwerk hinzu. Der Roboter verfügte nun über
folgende Sensoren :
- 3 Fotowiderstände (links, rechts und hinten)
- 1 Mikrotaster als Bumper
- 2 IR-Reflexlichtschranken vorne
- 1 Reflexlichtschranke hinten
- 1 Mikrofon (zwischenzeitlich auch mal 2, ich dachte man könnte so eine Geräusch Verfolgung realisieren, was aber so nicht geklappt hat :-( )
- ein IR Bewegungsmelder (des weise Teil vorne am Robot) der Bewegungen von Menschen erkennen sollte was im Stand auch gut funktionierte
- 2 Radencoder an den beiden Antriebsrädern zur Messung der Geschwindigkeit
- 1 Temperatur-Sensor an den MosFets für die Motoren
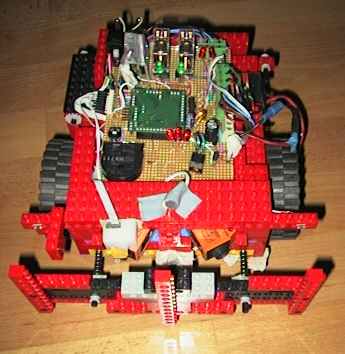
Weitere Bilder von der 2.Version
3. Version
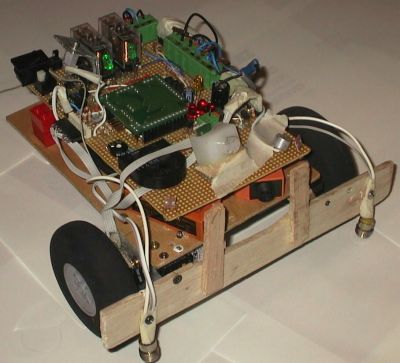 Die
3. Version unterscheidet sich hauptsächlich darin das, das Fahrwerk nun nicht
mehr aus LEGO sondern aus Getriebemotoren und einer Holzplatte besteht. Die
Platine wurde von der 2.Version übernommen. Der Roboter wurde zusätzlich mit
zwei nach unten gerichteten Reflexlichtschranken die den Roboter davor bewahren
sollten eine Kante herunter zu fallen.
Die
3. Version unterscheidet sich hauptsächlich darin das, das Fahrwerk nun nicht
mehr aus LEGO sondern aus Getriebemotoren und einer Holzplatte besteht. Die
Platine wurde von der 2.Version übernommen. Der Roboter wurde zusätzlich mit
zwei nach unten gerichteten Reflexlichtschranken die den Roboter davor bewahren
sollten eine Kante herunter zu fallen.
