
| Weiter Bilder der 2.Version | |||

Die 2. Version |
|||

Draufsicht: man erkennt die Einzelteile des Robots. |
|||
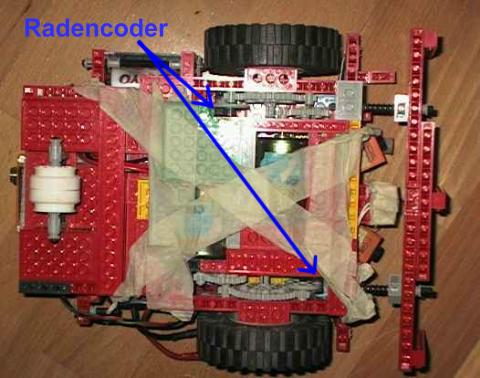
So ganz ausgereift war die Technik noch nicht die Motoren sind öfter mal raus gefallen und ziemlich laut war das Getriebe auch. Das starre Stützrad verbesserte das Gradeausfahren. Mit einem drehbaren Stützrad ist der Roboter immer in einem leichten Kreis gefahren. Die Radencoder bestehen aus Brückenlichtschranken einem Lochrad. |
|||
| Hier ein kleines Video von meinem
Robot!!(ca. 2.2 MB)
Man erkennt das der Robot sehr schnell fährt und durch die Relais sehr Ruckartig abbremst. Diese Fahrweise hat das LEGO Getriebe nicht lange überstanden! |
|||
